
区域环绕(仿地):生产区域范围内有重叠的环绕航线,适合对区域范围进行建模,可以生产仿地航线;
带状环绕(仿地):依照带状中心线向两侧外扩,航线行进方向垂直于中心线的偏航角方向,生产带状环绕航线,适合对带状区域进行建模,可驾驶车辆跟随飞行器进行作业;
折线环绕:在兴趣点生上成不连续的环绕航线,适合零散房屋倾斜摄影作业,可用正射连接不同兴趣点的环绕航线进行空三;
电力环绕:沿电力线路变高拍摄的环绕航线,配合大疆智图进行重建,可获得高质量的电力廊道点云成果。
1、环绕内重叠率:是指同一个环绕航线内,相邻两张照片的重叠率,环绕内部重叠率我们没有进行量化,可以通过采集数控制。
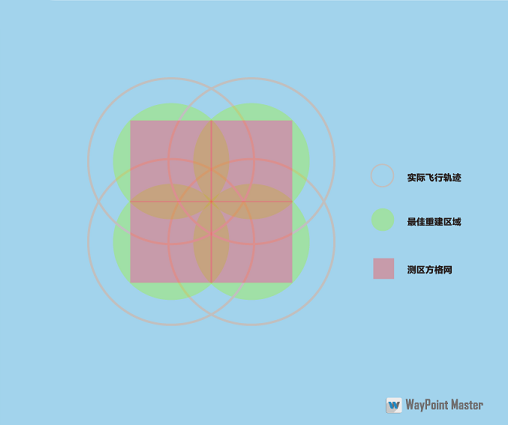
2、环绕间重叠率:是指每相邻两个环绕航线的重叠率。
如图所示,每个环绕航线的实际飞行轨迹覆盖的最佳重建效果区域我们用绿色表示,取内接正方形为单个方格网覆盖的有效区域,相邻的环绕航线内接正方形刚好相接的情况是环绕航线的最低重叠率。将整个测区结合航摄参数切割成均匀的方格网,就可确保环绕航线的重建效果。
2、环绕采集数主要由相机焦距决定,焦距越长,单张影像拍摄的有效地面范围越小,环绕采集数可以适当增加,反之同理。
3、房屋密集区域可以适当增加重叠率,可以增强重建效果。
4、WayPoint Mater已对最佳航线参数进行默认设置,如无特殊需求,可以不做更改。
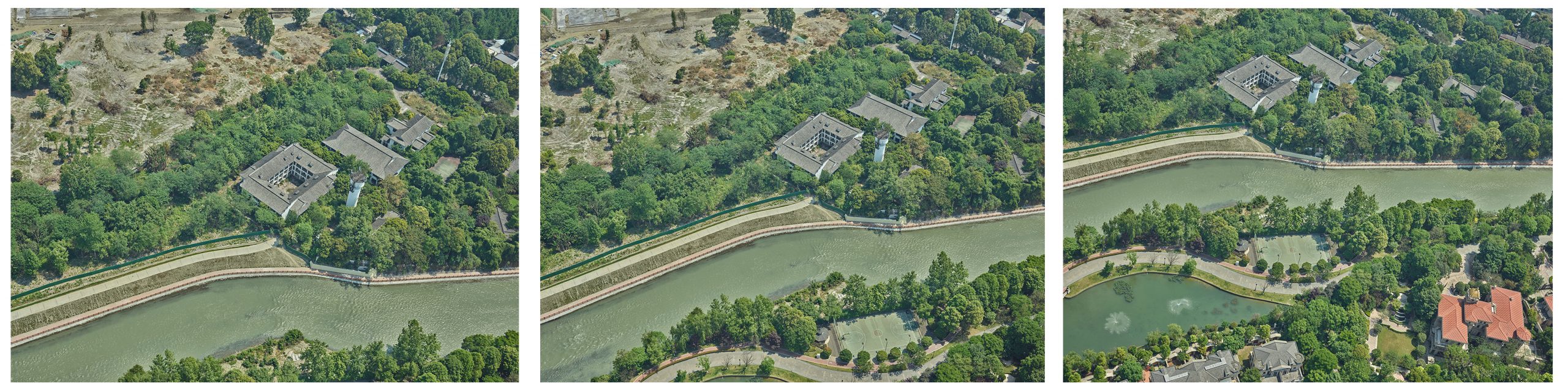
环绕飞行相机的成像中心一直对准测区兴趣区域,从连续影像判断,单组环绕航线的成像中心变化不大,并且与五向/环绕采集相比,对兴趣区域采集的角度更多。单组环绕航线针对兴趣区域采集的角度与环绕采集数相关,至少能保证一半以上的影像采集到兴趣区域,采集的角度更多,有利于三维重建。

如何确保航线安全?
1、对中环绕模式,是指飞机偏航角与相机偏航角一致,作业时飞机的偏航方向指向环绕航线圆心,适合外业采集条件简单的区域作业;
2、切线环绕模式,是指飞机的偏航角方向尽量沿着环绕航线当前采集位置的切线方向,由于严格按照切线方向存在拍摄脚架的缺陷,因此与切线方向呈一定夹角,并且在每两个环绕航线间转移时保证飞机的FPV方向(正飞)或相机的方向(倒飞)是沿着飞机的前进方向,适合作业采集条件复杂的区域作业。
切线环绕模式为M300 RTK环绕航线生产的默认模式,如果需要使用对中环绕模式可使用通用航线生产,同样适配M300 RTK机型。对中环绕分为悬停模式,主要适配精灵4 RTK;不悬停模式,主要适配M300 RTK。

2、为了避免导入任务卡顿,我们对任务进行了切割,保证每个任务不大于300个航点。
3、由于航线任务逻辑问题,需要人为干预航线断点:
●对中环绕模式需避免在每个环绕航线的第4-5个航点中间断点,其他任意点中断均可;
● 切线环绕模式需在每个环绕航线的第4-5个航点接近第五个航点位置或接近下一个环绕航线第1个航点位置中断。
确保重建质量?
1、增加相对航高,减小俯仰角度,使用折线环绕手动设定环绕航线圆心点。优点是可以指定在任意位置生产环绕航线,对可能存在数据质量较弱的区域进行加强采集。
2、使用同一航高采集2次数据,是针对分辨率有严格要求项目的解决方案。使用满足分辨率要求的航高完成一次数据采集后,使用环绕仿地功能,导入测区DEM数据,输入高差改正数为楼体的2/3高度,相对航高输入第一次航高减去高差改正数,即可保证生产的航线成像中心对准楼体的2/3处,并且飞行高度与第一次采集一致。这种方法的优点是可以在提高分辨率的同时,保证高楼重建外业数据采集的完整性。
如何设置仿地航线?


根据目前用户的主流作业模式,我们根据实测经验,总结一下机组效率对比:
1、相同传感器的相机使用环绕与五向采集,环绕飞行采集的影像数量约为五向的1/3;
2、不同传感器的相机使用环绕与五镜头,全画幅单镜头环绕采集相同作业面积的照片数量约为五镜头正射采集的10~20%,主要原因是环绕对影像采集的有效率比五镜头高,并且采集相同分辨率的影像,全画幅单镜头可以比C画幅五镜头飞的更高;
3、使用大疆P1环绕与扫摆照片数量对比,参照第一条,环绕采集数量约为扫摆的1/3。
由于曝光间隔对扫摆作业的航速限制,在作业面积小于0.3km²时,环绕飞行与扫摆作业效率一致,作业面积大于0.3km²,环绕外业效率优于扫摆作业。在航高较高的作业情况下,曝光间隔对航速的限制变小,扫摆作业的模式外业效率优于环绕采集的模式。
