
机载激光雷达技术,是将激光测距设备、GNSS(全球定位系统)设备和INS(惯性导航系统)等设备紧密集成,以飞行平台为载体,通过对地面进行扫描,记录目标的姿态、位置、反射强度等信息,获取地形的三维信息以及目标的状态和特性等遥感信息,并深入加工得到所需空间信息技术。

大疆10月14日正式推出了可见光融合解决方案禅思 L1,禅思L1 集成 Livox 激光雷达模块、高精度惯导、测绘相机、三轴云台等模块,搭配经纬 M300 RTK 和大疆智图,形成一体化解决方案,轻松实现全天候、高效率实时三维数据获取以及复杂场景下的高精度后处理重建。至此,大疆完成了机载激光雷达系统所有设备的集成。

机载激光雷达系统的构成主要包括:测量飞行平台、全球定位导航系统、惯性导航系统、激光扫描测距、数码成像系统和数据处理系统等组成。
测量飞行平台:
测量飞行平台是机载激光雷达系统进行作业的载体,M300 RTK搭载禅思L1不仅是飞行平台,还可以记录准确的位置信息。
全球定位导航系统(GNSS):
通过GNSS动态差分可以提供飞机的实时位置,M300 RTK最高可以提供平面1cm+1ppm,高程1.5cm+1ppm的定位精度。
惯性导航系统(INS):
通过INS可获取准确的激光器姿态信息,包括俯仰、横滚、航向等参数。禅思L1可提供200HZ IMU更新频率,后处理航向精度0.08°,横滚、俯仰精度0.025°。
GNSS与INS共同组成了高精度定位测姿系统(POS),可为后处理成果提供高精度过程数据文件。
激光扫描测距系统:
用于测量传感器到被探测目标的距离D;在激光雷达系统中,由发射机发出的无线电波射到空中后,一部分经物体或空气反射后,由雷达的接收系统接收,这部分反射波称为雷达信号,反映从反射无线电波的物体到雷达的距离。禅思L1测距精度3cm@100m,支持3次回波,扫描方式支持重复线性扫描与非重复花瓣扫描。
数码成像系统 :
主要用于获取目标真彩色影像信息,禅思L1标配2000万像素测量型相机。
数据处理系统:
支持使用大疆智图进行处理,输出点云格式:PNTS/LAS/PLY/PCD/S3MB 格式;支持按真彩色、反射率、高程着色显示。

与摄影测量相比,机载激光雷达系统具有直接快速获取三维空间数据、数据处理自动化程度高、作业速度快、外业工作省、测量精度高以及作业成本低等特点。可以最大程度的反应真实地表,为数字城市规划、工程建筑测量、电力设计勘测选线和线路监测、灾害监测与环境监测、林业种植与规划等领域快速提供基础数据。
数据采集
与摄影测量一致,机载激光雷达系统的内业精度取决于外业数据采集方法。科学合理的采集外业数据可以最大程度的减少内业处理难度,提高内业成果精度。点云成果的输出需要将POS(定位和姿态)数据通过时间内插配准到lidar数据中。
POS系统中的姿态信息由惯性导航系统获取,惯性导航系统会随时间累积误差。原因是基于IMU的定位(也就是我们通常称为的惯性导航)本质上属于航位推算定位,定位解算是基于运动积分的,之前定位结果中的定位误差会累积到当前定位结果中,同时由于IMU本身的零偏,最终表现就是定位误差会随时间累积。
而姿态信息的误差是角度误差,与常规测量仪器水准仪的i角误差、全站仪的竖盘指标差类似,距离越远,会导致误差越大。因此在外业执行的过程中,需要结合IMU的特性,设计航线任务,避免姿态信息不准确导致最终结果精度变差。

基于机载雷达系统的数据采集特性结合业内顶尖雷达技术团队成都航维智芯科技有限公司的外业经验,WayPoint Master对Lidar航线设计进行了优化,
Lidar航线优化特性:
1、斜率仿地:通过计算特征变高航点的斜率,通过斜率阈值调节控制仿地航线的输出;
2、闭合航线:通过输入静置IMU时的起飞点和高程,生产包括通往测区及测区返航的两程仿地航线,让整个作业流程安全可控;
3、前后IMU校准:依据Lidar的IMU的特殊要求设计起飞后和降落前的IMU校准航线,并与正式航线合为一体;
4、切线进入测区:对于需要画8字进行IMU校准的Lidar,在生产起飞校准的航线时通过计算校准结束点与测区起始点之间的偏航角,调整校准航线的角度,让校准航线的结束以切线的方式进入测区,最大程度上避免校准后的IMU由于非匀速运动导致误差的增加;
5、调节前后IMU校准偏航角:可重复调节前后IMU校准航线的偏航角,避开校准航线上的障碍物和风险点,提示航线的安全性;
6、中段IMU校准:依据IMU的中段校准需求进行自动的中段校准航线的插入,极大减少了人工计算绘制中段IMU校准的工作量,适时的校准IMU的漂移和累计误差,进一步提示数据解算的质量;
7、动态协调转弯:全航程动态计算协调转弯半径,精准的控制转向的角度和半径得到更平滑的航线速度,保证数据解算的质量;
8、智能锐角补偿:对无法避免的锐角折点进行更进一步的补偿,以特殊的算法通过增加航点的形式将锐角转弯补偿为更大的弧线转弯,保证平滑的航速和更少的机体倾斜程度,保证数据解算的质量;
9、测区外转向:针对区域测区,将所有的转向点和转向航线都外扩至测区以外,保证测区内部的航线横平竖直,在测区内控制出均一的点云密度;
10、断点续飞:通过输入断点的航点编号,重新生成闭合的全程仿地的包含完整的前后IMU校准的续飞航线;
结合Lidar航线特性,与可见光载荷航线相比,我们总共优化22项中Lidar航线设计特性,更多机载雷达航线优化特性,购买WayPoint Master后惊喜呈现。
让所有人都可以轻松的获取高质量的外业采集数据一直是WayPoint Master致力于实现的目标,结合上述Lidar航线生产特性,我们做到了Lidar航线自动化生产,并且推出了三个Lidar航线设计模块:区域测绘、带状测绘、电力廊道。
区域测绘:
生产支持M300 RTK的区域仿地航线及平飞航线,适配了大疆禅思L1机载雷达的定制化作业流程,实现Pilot地面站配合禅思L1机载雷达进行区域地理数据采集的功能。

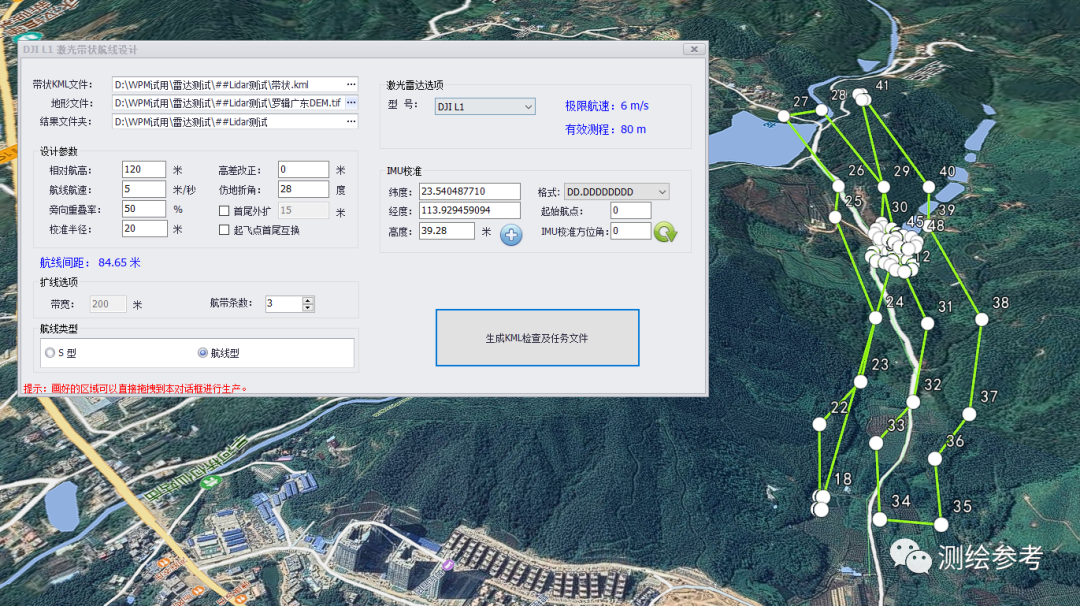
带状测绘:
生产支持M300 RTK的带状仿地航线及平飞航线,可按S型或航线型前进。适配了大疆禅思L1机载雷达的定制化作业流程,实现Pilot地面站配合禅思L1机载雷达进行带状地理数据采集的功能。
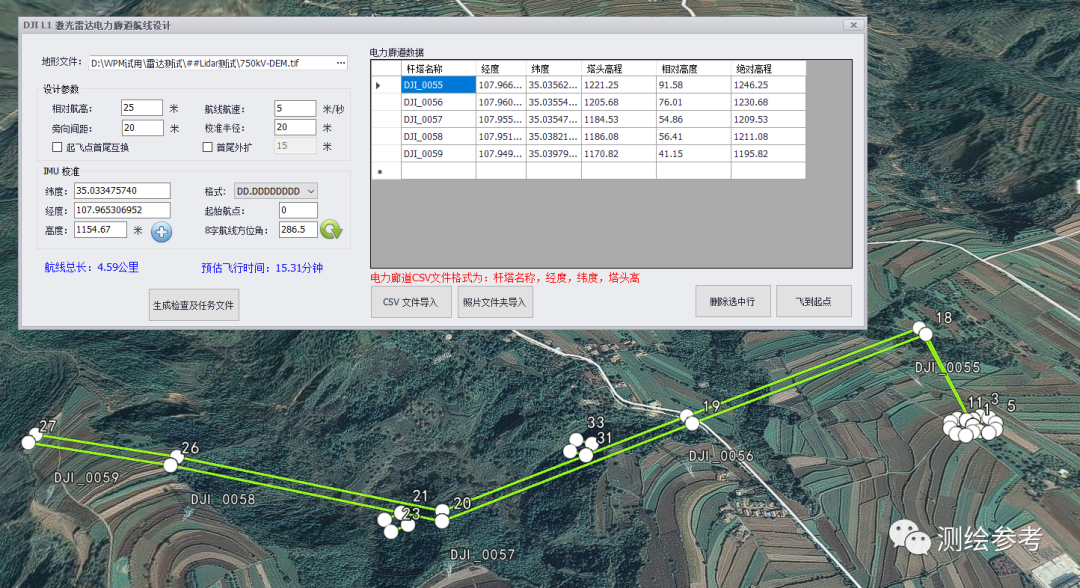
电力廊道:
生产支持M300 RTK的电力廊道仿塔头高度飞行航线,适配了大疆禅思L1机载雷达的定制化作业流程,实现Pilot地面站配合禅思L1机载雷达进行电力廊道地理数据采集的功能。
WayPoint Master通过多版本迭代实现了结合产品特性和外业飞行经验,对载荷进行高质量外业采集方案航线规划的功能。对于大部分用户都不熟悉的机载雷达领域,随着禅思L1普及,大师级雷达外业航线规划方案WayPoint Master必将是您机载雷达数据外业采集方案的得力帮手。
更多WayPoint Master相关信息,请扫描下方二维码加入我们的官方QQ群进行了解:

本篇文章来源于微信公众号: 测绘参考