
在室内场景或半开阔半室内的场景测量中受卫星搜星被遮挡、内部环境复杂、通视条件差等条件的影响,三维激光雷达设备在地下空间测量项目中备受青睐。以往的方式是需要去购买昂贵的进口架站三维扫描仪(徕卡、天宝),当然现在依然昂贵,且操作流程复杂,需要过多人工干预,效率低下,维修成本超级高,很难实现室内外一体大范围数据获取。优点是相对精度和绝对精度都很高,点云细腻,厚度薄,呈现效果好看。
这里我们引入了手持SLAM三维激光扫描仪这样一款设备。SLAM英文全称:Simultaneous Localization and Mapping,即时定位与地图构建。三个关键词:即时、定位、地图构建。
围绕这款设备,国内发展已经远超国外,手持SLAM品牌也已经超十几家之多,在市场终端销售还不温不火的时候,国内厂家已经从性能、价格卷的你死我活了。本次测试数据基于三个厂家测出的基础数据:H厂家、Q厂家、S厂家,由于各种环境因素,不对产品的最终性能下结论,只做出个人意见表达。
2024年10月接到客户紧急需求,需要对一条150米长度的排洪隧道进行测量定位,需要室外部分场景及排洪隧道的完整点云数据,且需要绝对坐标精度,要求精度误差小于5cm,隧道内有水,无法做控制点,由于时间特别紧张,客户第一次使用H厂家手持数据出现问题,我们临时决定携带了Q厂家手持及厂家技术支持去了项目现场,所以这次的比测既是解决问题也是临场发挥。
二、解决方案:
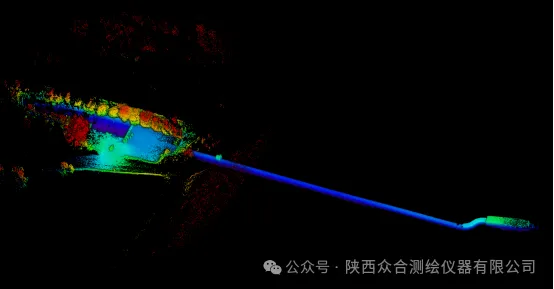
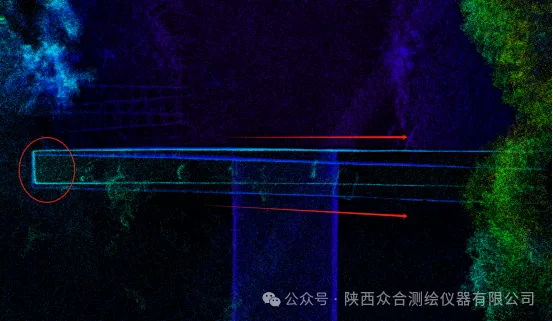
两款设备都支持RTK+slam定位融合技术,且软件都带坐标纠偏功能,基于产品性能,我们先通过室外定位加slam扫描的方法进行室外扫描,然后再进入排洪隧道在无GPS、无光、隧道特征点较少的环境内进行直线扫描,在隧道底部扫描结束后关闭设备,关闭后出来解算数据,进行数据对比。
三、现场对比:
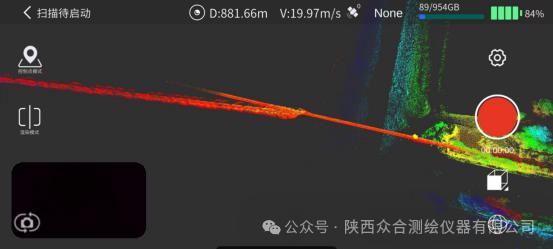
在扫描的时候,两款设备都支持外接平板或手机显示,这里H厂家手持是自带平板,Q厂家手持需要安卓手机下载对应app连接设备,都输入千寻CORS账号,固定解后开始测量,这里在室外扫描时间保持一致,然后进洞扫描。现场环境确实不太好,为了保证安全,还带了氧气瓶和气体检测仪。




四、数据解算:
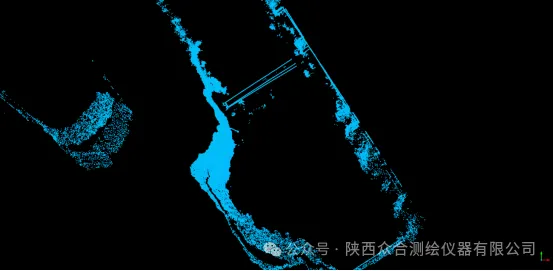
最终成果需要绝对坐标,两款设备都配备了后处理软件(免费),解算时间也ok,不超过30分钟,Q厂家手持的后处理非常强势,硬是把已经偏移的轨迹纠正回来,H厂家数据处理后和实时显示的数据基本一致,两个点云整体方向基本一致,没有分层,肉眼难分真假。当然还是要比较的,我们将两个数据加载到一起,神奇的事情出现了。
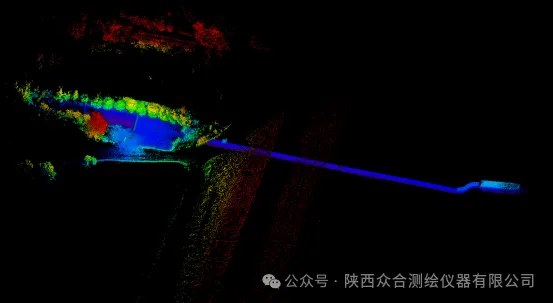

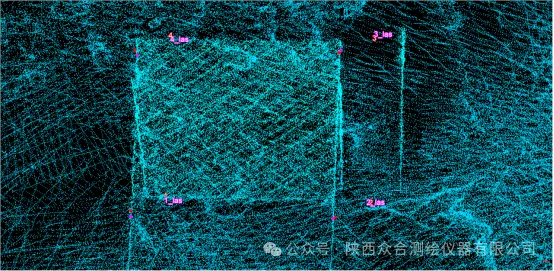
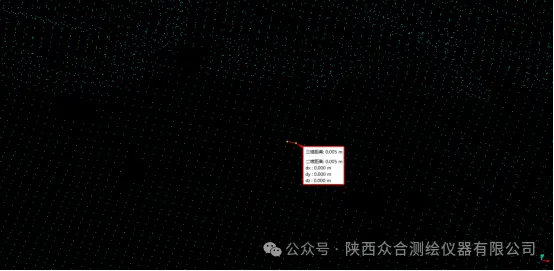
哪个数据更准确,我们使用H厂家手持自带的RTK功能进行检查点测量,室外8个检查点,分布如下,检查点和Q厂家手持扫描的成果全部符合,H厂家的数据竟然飞掉了,我们当时一度不相信,又二次进洞用Q厂家手持扫描再测了一遍,这次实时数据更夸张,进洞后轨迹就飞了,但是后处理的数据和第一次 Q厂家手持数据对比,完全贴合,平面误差只有2cm。
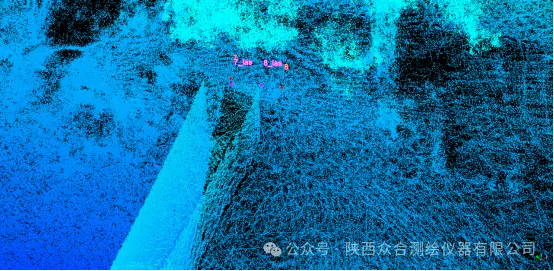
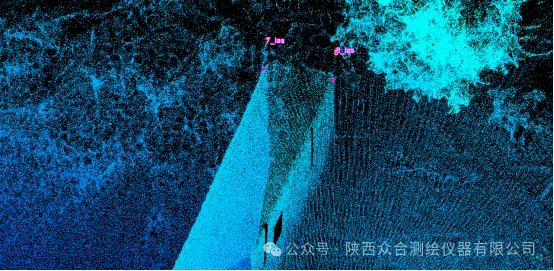
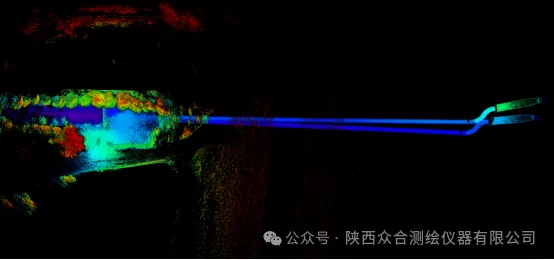
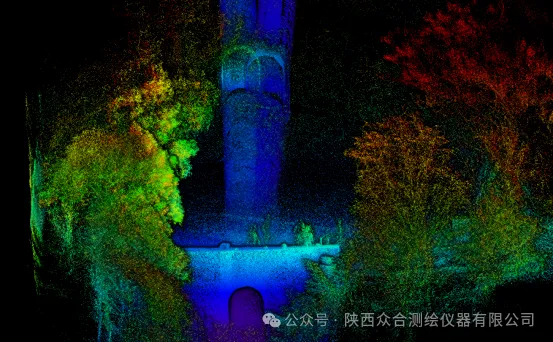
Q厂家手持后处理软件还支持5mm点云间距重新排列处理,最多可至1mm点云间距排列,后面再处理了一次5mm的,数据量由最开始的700M涨到了3.7g,精度不变的情况下,点云整体显示效果更薄,更细腻,排列更规整(类似架站扫描的效果),附色也更好看。H厂家精度完败,除了添加控制点纠偏去解决数据飞掉的问题外,厂家技术也没有给出什么新方案了,其他就更难比较了(这里欢迎H厂家厂家提供32线新样机用于测试)
我们最终要到了S厂家的一些点云数据,将3个厂家数据放在一起比较,H与S厂家点云质量、厚度、附色、室外绝对精度表现相同,Q厂家数据质量略胜一筹,在经过Q厂家的无间TM点云算法处理后,数据质量明显与其他两家拉开差距,场景细节纤毫可见。Q厂家还推出了融合slam和3DGS的商用软件产品:LCC。底下的视频大家一起欣赏。