
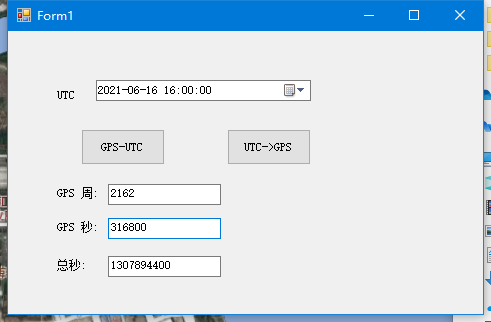
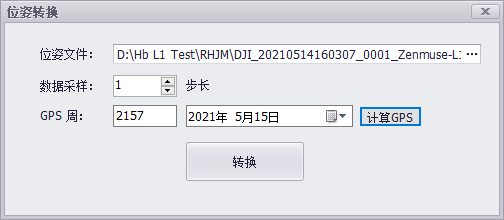
 在上一段落我们着重介绍两种计时方式差异的主要原因是DJI Terra输出的轨迹文件内记录时间为UTC时间,不含周数,而点云文件内存储的时间为GPS时间的总秒数,因此需要对两种时间进行处理。DJI Terra输出的成果文件包含二进制存储的点云录制轨迹文件,是以DJI开头包含任务时间信息,以misson_sbet.out结尾的二进制文件。使用terra solid可以进行读取,而为了方便用户使用,我们在WayPoint Master内置了转换工具,可以一键直接读取sbet.out文件,输入数据采集时间,可以反推GPS周数,最终输出CSV格式的轨迹文件。
在上一段落我们着重介绍两种计时方式差异的主要原因是DJI Terra输出的轨迹文件内记录时间为UTC时间,不含周数,而点云文件内存储的时间为GPS时间的总秒数,因此需要对两种时间进行处理。DJI Terra输出的成果文件包含二进制存储的点云录制轨迹文件,是以DJI开头包含任务时间信息,以misson_sbet.out结尾的二进制文件。使用terra solid可以进行读取,而为了方便用户使用,我们在WayPoint Master内置了转换工具,可以一键直接读取sbet.out文件,输入数据采集时间,可以反推GPS周数,最终输出CSV格式的轨迹文件。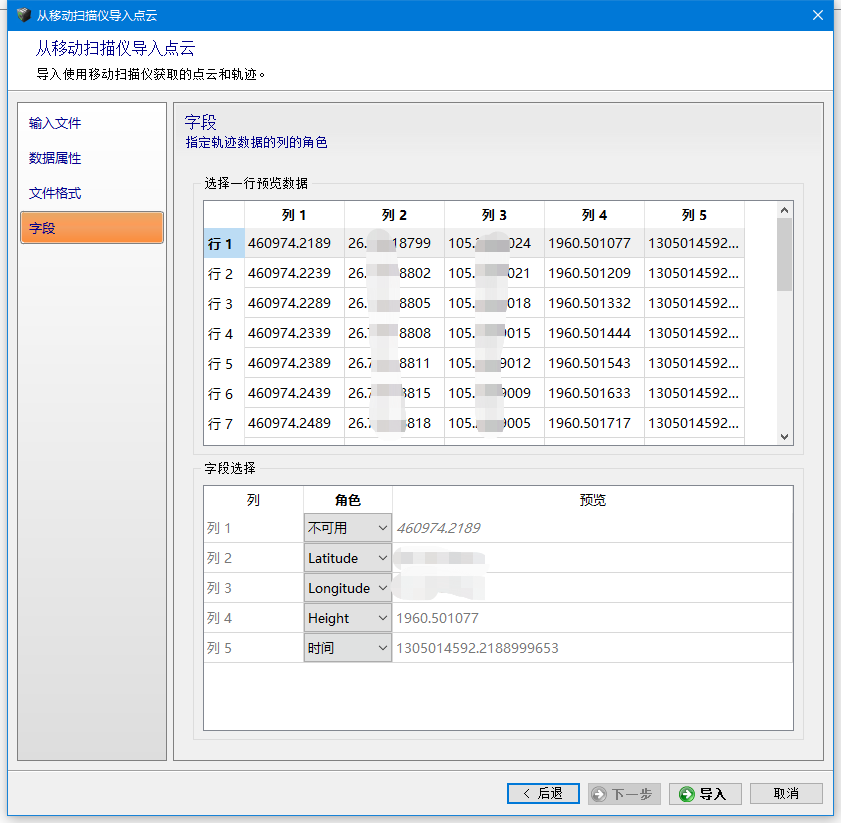




2、如果是带转换参数的目标坐标系,是否需要提前将点云以及轨迹文件提前转换至目标坐标系,还是通过空三刺点可以直接平移导入CC的点云数据。
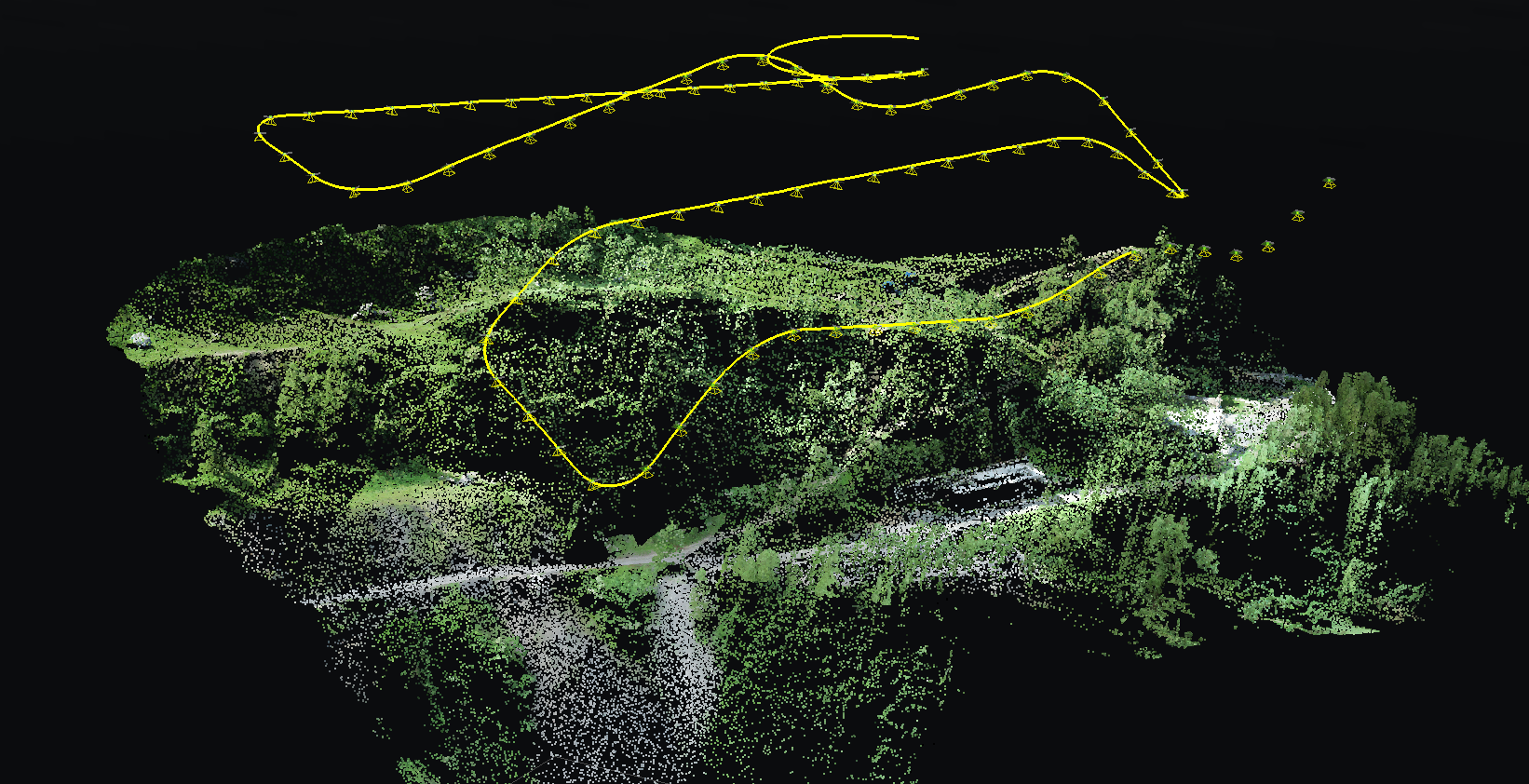
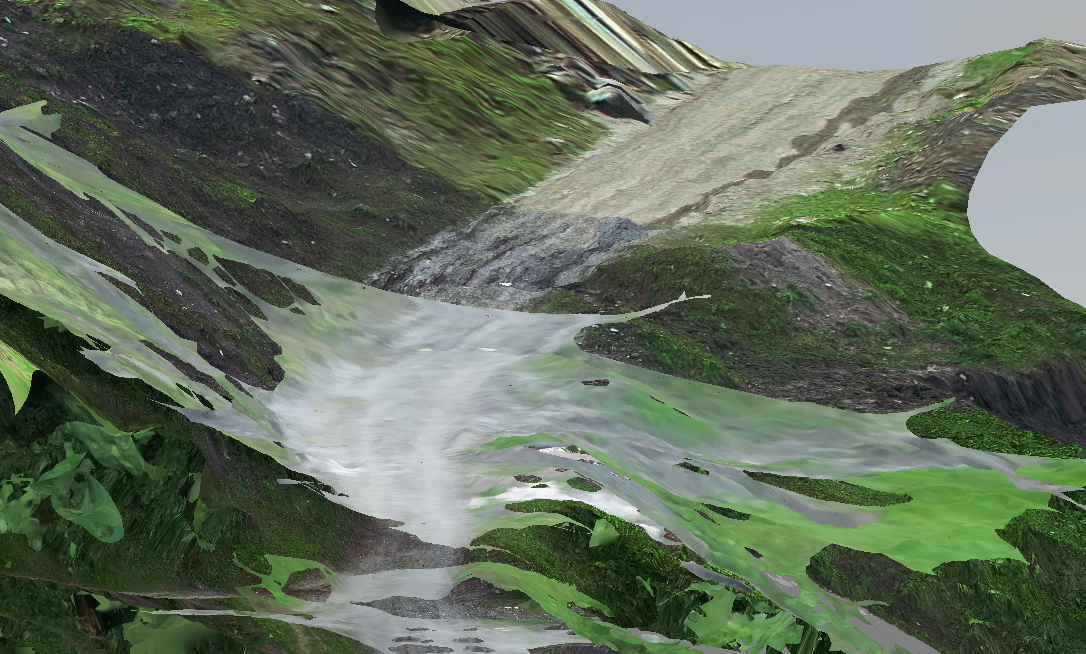
个人认为激光雷达与可将光影像数据融合处理,更主要是发挥激光雷达对细小结构采集的优势,补充可将光数据没有达到一定分辨率不能重建的劣势,因此我们下一步也将整理采集更多适合融合处理场景的数据,争取融合处理的优势发挥出来。
本文所涉及的位姿转换功能为WayPoint Master提供的禅思L1雷达轨迹文件一键提取工具,如您对WayPoint Master感兴趣可扫描下方二维码进行了解。
